
Seit Tausenden von Jahren hat der Homo sapiens die Möglichkeit, die Wanderungen und allgemeinen Gewohnheiten wilder Tiere zu beobachten, insbesondere indem er ihren Spuren folgt. Dies galt auch für Naturforscher und Wildbiologen bis einschließlich des 20. Jahrhunderts. Das Verfolgen von Tieren, um Informationen über ihre Bewegungen zu sammeln, ist im Winter einfacher, wenn die Spuren im Schnee deutlich sichtbar sind. Im Sommer ist die Verfolgung von Wildtieren viel schwieriger und arbeitsintensiver. Daher war die Entwicklung der UKW-Telemetrie in den 1950er Jahren ein Quantensprung in der Erforschung von Wildtieren. Heute geht es bequemer: Mit GSM und GPS Satellitentelemetrie können die Raumbewegungen von Wildtieren nach der Besenderung am PC verfolgt und analysiert werden.
Telemetrie mit VHS-Sender
Jetzt war es jederzeit möglich, die Signale von Tieren zu erkennen, die mit einem Sender ausgestattet waren, und so ihre Position zu bestimmen. Zum ersten Mal konnte das Verhalten von zurückgezogenen oder nachtaktiven Tieren untersucht werden. Nach einigen Jahren der Entwicklung waren die VHS-Sender so klein und leicht, dass Fledermäuse und sogar Bienen damit ausgestattet werden konnten (BINNER 1995). Jede Position eines Tieres musste jedoch manuell durch Kreuzpeilung lokalisiert und die Koordinaten aus einer Karte bestimmt werden. Später konnten die Positionen aus automatisch betriebenen Bodenstationen ermittelt werden (BÖGEL et al. 2002). Der Bereich, in dem sich Tiere an Land befinden konnten, variierte zwischen einigen hundert Metern und einigen Kilometern (abhängig von Temperatur, Luftfeuchtigkeit, Topographie, Vegetation usw.).
Durch die Luftverfolgung wurde die Reichweite der Überwachung auf 10 Kilometer erhöht. Veröffentlichungen berichteten selten über die Störungen, die bei den untersuchten Tieren verursacht wurden. Darüber hinaus konnte die Genauigkeit der ermittelten Standorte nicht quantitativ ermittelt werden (LEE 1985, SARGEANT 1980, WARNER und ETTER 1983, WEBSTER und BROOKS 1980, WHITE und GARROTT 1990).
Satellitentelemetrie Anfänge mit ARGOS
Seit 1978 können die Bewegungen von Wildtieren mit Hilfe von Satelliten vermessen werden, der Forscher wurde Homo satelliticus. Die französische Weltraumbehörde und die US-amerikanische National Oceanic and Aeronautics Administration (NOAA) haben das ARGOS-Satellitensystem eingerichtet. Die Argos-Satelliten lokalisierten die von einem Argos-Sender (auch PTTs – Platform Transmitter Terminals genannt) gesendeten Signale (Frequenz und Codenummer) und sendeten die Daten an Bodenstationen, die die jeweiligen Positionen berechneten und diese wiederum an den Benutzer weitergaben. Das ARGOS-System garantiert eine weltweite Abdeckung, obwohl abhängig vom Breitengrad die Anzahl der Überflüge und damit die Anzahl der Positionsbestimmungen begrenzt ist (6 Überflüge am Äquator und 28 Überflüge nördlich des 82 ° Breitengrads, ARGOS 1984). Zum Empfang der Signale von einer PTT wird nur ein ARGOS-Satellit benötigt, die Standortbestimmung erfolgt durch Doppler-Berechnungen.
Auch Wanderfalken
Mit dem ARGOS-Satellitensystem konnten erstmals weltweite Untersuchungen der Verbreitungsgebiete, der Wahl des Lebensraums und des Verhaltens vieler Tierarten durchgeführt werden: zum Beispiel Eisbären (KOLTZ et al. 1980), Karibu (CRAIGHEAD und CRAIGHEAD) 1986), Kamele (GRIGG 1987), Pinguine (LE MAHO 1994) und Wanderfalken (HOWEY 1994). Das ARGOS-System eignet sich besonders zur Lokalisierung weitreichender Tierarten, da die Lokalisationen nur von einem bis fünftausend Metern genau sind. Das Karibu der Stachelschwein-Karibu-Herde im Yukon Nord-Alaska legte beispielsweise zwischen Sommer- und Winterreichweite bis zu 5055 km zurück. Die Fehler bei der Positionsbestimmung sind hier nicht signifikant. Am Anfang waren die Argos-Sender relativ schwer; (CRAIGHEAD und CRAIGHEAD 1987) verwendeten für ihre Untersuchungen von Karibu solche mit einem Gewicht von 2,1 kg.
In Deutschland wurde das Argos-System Anfang der 90er Jahre speziell zur Untersuchung des Migrationsverhaltens von Vögeln eingesetzt. So untersuchten beispielsweise BERTHOLD et al. (1992) und KAATZ (1995) das Flugverhalten von Störchen.
Weiterentwicklungen: GPS Telemetrie
Inzwischen hat sich die Genauigkeit des Argos-Systems deutlich verbessert: Je nach Lokalisierungsklasse können mit Sendern mit einem Gewicht von 25 g Werte zwischen 100 und 3000 m erhalten werden (BRITTEN et al. 1999).
Unter anderen Tierarten oder insbesondere im kleinen Europa, wo beispielsweise auch große Säugetiere, Rotwild, häufig Reichweiten von nur 500 bis 2000 ha aufweisen (GEORGII und SCHRÖDER 1983), sind Positionsbestimmungen mit einer Varianz von weniger als 100 m für die Gültigkeit erforderlich führt zur Untersuchung der Bewegungen von Wildtieren.
Das Global Positioning System (GPS) bietet eine solche Genauigkeit. Seit 1994 steht dieses System kostenlos für den zivilen Gebrauch zur Verfügung. Dieses Satellitensystem wird vom US-Verteidigungsministerium mit dem Ziel betrieben, einen bestimmten Punkt auf der Erde mit einer Genauigkeit von 1 m oder weniger zu lokalisieren. Im Prinzip sendet jeder der 36 NAVSTAR-Satelliten permanent verschiedene Signale, die unter anderem die Übertragungszeit und die aktuelle Position enthalten. Die GPS-Empfänger auf der Erde empfangen diese Signale und berechnen über die verstrichene Zeit ihre Entfernungen zu den jeweiligen Satelliten. Wenn Signale von mindestens 3 Satelliten gleichzeitig empfangen werden, kann die Position des GPS-Empfängers in zwei Dimensionen berechnet werden, d. H. Seine Position auf der Erde (HURN 1989).
Ein weiteres Satellitennavigationssystem wird von der sowjetischen Glonass betrieben. Dieses System ist jedoch in der Wildtierforschung von geringer Bedeutung und wird hier nicht weiter behandelt.
Beispiel Rothirsch
Die hohe Effizienz der Telemetrie mit GPS ist in Abbildung 1 dargestellt. Dargestellt sind die ermittelten Positionen eines Rothirschweibchens in einem Mittelgebirge in Deutschland, in chronologischer Reihenfolge verbunden. Der GPS-Empfänger zeichnete stündlich seine Position auf. Die Daten wurden dann mit thematischen Karten in ein geografisches Informationssystem übertragen.
Das Tier benutzte das ganze Jahr über zwei Bereiche und bewegte sich häufig zwischen diesen durch einen engen Korridor. Der obere Bereich umfasste eine Fläche von 1780 ha, der untere 1540 ha (laut MAM). Auffällig ist hier das Bewegungsmuster des Rotwilds: Es wanderte fast immer nur an die Peripherie seines Verbreitungsgebiets von einem zentralen Kerngebiet, in das es schnell zurückkehrte. Längere Wanderungen oder Ausflüge über mehrere Tage außerhalb der „normalen“ Bereiche fanden nicht statt

Abb. 1: Standorte eines weiblichen Rotwilds im Bayerischen Nationalpark, Mai 2001 – März 2002 (n = 6500)
Vorteile der GPS-Sender
Die Vorteile der Telemetrie in der Wildtierforschung mit GPS im Vergleich zur UKW-Telemetrie sind folgende:
1. Mehrere tausend Standorte können von einem Halsband empfangen und aufgezeichnet werden.
2. Die Daten werden automatisch und kontinuierlich ermittelt.
3. Die vorgegebene Zeit für jede Positionsbestimmung kann frei gewählt werden (auch für jede einzelne Position.
4. Die Daten stehen dem Benutzer sofort digital zur Verfügung und können sofort ausgewertet werden.
5. Weder die Tiere noch das Ökosystem sind gestört.
6. Günstige Kosten des gesamten Systems
Die Nachteile der Telemetrie von Wildtieren mit GPS gegenüber der UKW-Telemetrie
1. In Bezug auf die Körpermasse sind die GPS-Halsbänder relativ schwer, insbesondere für Säugetiere.
2. Die GPS-Halsbänder müssen aus Tierschutzgründen durch Wiedererfassung der jeweiligen Tiere wiedererlangt werden (Ausnahme: „Abgabemechanismus“).
3. Derzeit keine Anwendungen in der Meeresbiologie, da GPS unter Wasser nicht funktioniert.
4. Begrenzte Verwendung unter dichter Deckung, zum Beispiel in Regenwäldern,
5. Gelegentliche Probleme bei der Datenübertragung.
Für die Anwendung in der Telemetrie von Wildtieren wird der GPS-Empfänger mit zusätzlicher Hard- und Software geliefert, die in die Halsbänder integriert ist. In der Regel ist auch ein UKW / VHF-Sender enthalten, um die Lokalisierung der Tiere vom Boden aus oder per Flugzeug zu ermöglichen.
Aktivität des Tieres und Umgebungstemperatur können über weitere Sensoren erfasst werden
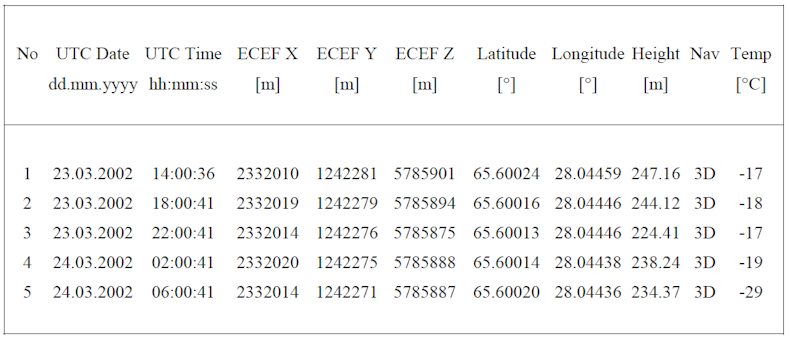
Im Gegensatz zu den PTTs des Argos-Systems bestimmen und erfassen die GPS-Empfänger ihre Positionen aktiv selbst. Die auf dem Markt befindlichen GPS-Halsbänder erfassen die X-, Y- und Z-Koordinaten sowie Datum und Uhrzeit der jeweiligen Standorte. Es besteht die Möglichkeit, zusätzliche Sensoren einzusetzen, um Daten zur Umgebungstemperatur und zur Aktivität des telemetrisierten Tieres aufzuzeichnen. In Tabelle 1 sind verschiedene Datensätze aus einer aktuellen telemetrischen Studie über Wölfe in Finnland dargestellt.
Tabelle 1: Typischer Datensatz eines GPS-Halsbandes aus einer aktuellen Studie über Wölfe in Finnland
UTC – Time System
Datum und Uhrzeit der Standorte werden nach dem UTC-System (Universal Time Coordinated) angegeben. Das UTC – Time System ist weltweit gültig und arbeitet das ganze Jahr über konstant. Es unterscheidet sich von unserer MEZ – Sommerzeit (Mitteleuropäisches Zeitsystem) um minus 2 Stunden, von der MEZ – Winterzeit um minus 1 Stunde. Die Werte der Koordinaten werden zuerst im ECEF-System (Earth Center Earth Fixed) erstellt und dann in Breite und Länge des WGS 84-Systems neu berechnet.
Die Daten werden normalerweise direkt an Bord eines GPS-Halsbandes auf einer Flash-Speicherkarte gespeichert, aber nicht weiter übertragen.
Beschaffung der Positionsdaten
Es gibt verschiedene Möglichkeiten für den Benutzer, auf die Daten zuzugreifen:
A. Das Halsband wird durch erneutes Erfassen des Tieres oder durch Aktivieren eines „Abgabemechanismus“ gesammelt, und die Daten werden dann über eine Computerschnittstelle gelesen.
B. Die Daten werden per UHF-Übertragung abgerufen.
C. Die Daten werden vorübergehend über eine Satellitenverbindung an eine Bodenstation übertragen.
D. Die Daten werden vorübergehend über eine Funkverbindung an eine Bodenstation übertragen.
Zu A: Die ersten GPS-Halsbänder, die ca. vermarktet werden. 1993 bot normalerweise keine Möglichkeit, Daten per Funk zu übertragen; Um die Daten zu sammeln, mussten die Tiere zurückerobert werden. Eine elegante Lösung für dieses Problem war die Entwicklung des sogenannten „Drop-Off“ -Mechanismus am Halsband, einer elektronischen Verriegelung, die den Gurt öffnet. Dieser Mechanismus wird z. B. von den Firmen Lotek und Followit hergestellt.
Herunterladen von Daten über Funk
Zu B: Das Herunterladen von Daten über Funk ist heute bei praktisch allen GPS-Halsbändern Standard. Der Standort des Tieres im Untersuchungsgebiet wird durch VHF / UHF-Signale bestimmt und die Daten bei einem Radiosender abgerufen. Die Anwendungen hier unterscheiden sich jedoch stark zwischen den Herstellern.
Kriterien für den Benutzer sind: a) die maximale Entfernung, über die die Daten vom GPS-Halsband zum Radiosender übertragen werden können (unter vergleichbaren Umweltbedingungen b) die Qualität der Datenübertragung (sind die Daten vollständig gesendet oder nur ein Teil davon c) die Zeit, die für einen vollständigen Download der Daten benötigt wird. Dies ist besonders wichtig, wenn die Daten aus einem Flugzeug heruntergeladen werden, wie dies in Amerika häufig erforderlich ist. Die Downloadzeit beträgt je nach übertragener Datenmenge in der Regel zwischen 5 und 15 Minuten.
Via Satellit
Zu C: Die Weitergabe von Daten über Satellit wird von der Firma Telonics, USA, angeboten, wobei der Sender des Argos-Satellitensystems verwendet wird. Derzeit wird dieses Telemetriesystem in den USA insbesondere für Studien an großen Säugetieren (z. B. www.taiga.net/satellite/index.html) eingesetzt, deren Lebensräume oft Tausende von Kilometern von der nächstgrößeren Stadt entfernt sind und deren Downloadkosten anfallen Daten aus einem Flugzeug sind exorbitant (GOLDEN 2001). Weitere aktuelle Projekte sind die telemetrische Untersuchung von Elefanten in Tansania (HOFER oral) und von Przewalski-Wildpferden und -Wölfen in der Mongolei (WALZER oral).
Weitere Satelliten
Die Verwendung anderer Satelliten bei der Weitergabe von Daten von GPS-Halsbändern ist ebenfalls möglich. In einem Pilotprojekt im Jahr 1994 wurden die Standorte von Rotwild im Harz über den Versuchssatelliten TUBSAT-A an die Bodenstation in Berlin übertragen (FIELITZ et al., 1996).
GSM Download der Daten inzwischen Standard
Zu D: GPS-Daten können direkt vom Halsband über ein Mobilfunknetz (GSM Global System for Mobile Communication) gesendet werden. Ein entsprechendes System wurde von der Firma VECTRONIC -Aerospace entwickelt. Hier werden die Standortkoordinaten der Tiere momentan von einem im Halsband integrierten GSM-Modem gesendet, ähnlich einer SMS, die per Handy gesendet wird. Die Daten werden direkt an das Büro des Benutzers gesendet. Voraussetzung für die Datenübertragung ist, dass der Untersuchungsbereich von GSM abgedeckt wird. Diese Form der Datenübertragung wurde erstmals im März 2002 an Rotwild im Nationalpark Bayerischer Wald und an Wölfen in Finnland ausprobiert (www.environmental-studies.de).
Genauigkeit
Genauigkeit: Die Genauigkeit, mit der der GPS-Empfänger seine Position bestimmt, variierte zwischen 25 und 80 m bis Mai 2000. Bis dahin hat das US-Verteidigungsministerium die Genauigkeit der Ortung von Positionen für zivile Zwecke absichtlich verringert (selektive Verfügbarkeit). Später wurde die selektive Verfügbarkeit reduziert, so dass im Durchschnitt eine Genauigkeit von 15 m bei der Positionsbestimmung erreicht werden kann.
Die Genauigkeit der Messung kann durch ein Differential-GPS deutlich verbessert werden. Es gibt zwei Möglichkeiten: Ein Modem, das korrigierte Daten von einer Referenzstation empfängt, deren genauer Standort bekannt ist, wird in das GPS-Halsband integriert und diese Daten werden in die Berechnung seiner eigenen Position einbezogen. Dies verbessert die Genauigkeit auf 4 – 8 m. Eine weitere Möglichkeit besteht darin, Datenfehler über Satellitenbahnen aufzuzeichnen und durch die sogenannte „Nachbearbeitung“ mit der ermittelten GPS-Position zu korrigieren. Die mit dieser Methode erreichbare Genauigkeit liegt je nach Arbeit im Bereich von 1 m und weniger. Differenzielles GPS wird von einigen Herstellern wie Lotek und Followit optional für GPS-Halsbänder angeboten. Der Benutzer sollte gründlich prüfen, wie genau seine Lokalisierungen sein müssen, um die Ziele seiner Forschung zu erreichen. Wie genau sind beispielsweise die Karten für die Datenauswertung?
Halsbandgewichte und Anzahl der Positionen
Die 1994 von Umweltanalysen verwendeten GPS-Halsbänder wogen etwa 1400 g und konnten maximal 800 Positionen aufzeichnen. Im Jahr 2002 hatten die GPS-Halsbänder mit der größten Kapazität ein Gesamtgewicht von 505 g und können bis zu 8000 Positionen aufzeichnen (Worst-Case-Berechnung). Ein Hersteller, Televilt, bietet ein GPS-Halsband an, das nur 80 g wiegt und höchstens 450 Positionen aufnehmen kann. Eine Datenübertragung über Funk ist mit diesem Instrument nicht möglich, die Programmierung und das Lesen der Daten werden vom Unternehmen durchgeführt. Das Unternehmen VECTRONIC-Aerospace hat ein 250-g-Modell entwickelt, das 1500 Positionen aufzeichnen kann. Die Daten können mit einem UHV-Modem abgerufen werden.
Batterien machen den größten Teil des Gewichtes aus
Das Gewicht der Halsbänder ist hauptsächlich auf das Gewicht der Batterien zusammen mit den anderen Hardwarekomponenten (Halsbandmaterial, Gussteile usw.) zurückzuführen. Der GPS-Empfänger wiegt nur 5 – 10 g. Die Anzahl der benötigten Batterien hängt von der Kapazität und dem Stromverbrauch der elektronischen Systeme ab, wobei allein der GPS-Empfänger 95% verbraucht.
Der Stromverbrauch der GPS-Empfänger hängt davon ab, wie viel Zeit zur Bestimmung einer Position benötigt wird und wie viel Zeit maximal dafür vorgesehen ist („GPS pünktlich“).
Gültige 2D-Lokalisierung
Für eine gültige 2D-Lokalisierung müssen die Signale von mindestens 3 Satelliten gleichzeitig empfangen werden, für eine 3D-Lokalisierung müssen die Signale von mindestens 4 Satelliten gleichzeitig empfangen werden. Abhängig von den äußeren Bedingungen (Geländetopographie, beispielsweise Schattierung des GPS-Halsbandes durch dichte Vegetation) kann eine große Zeitspanne vergehen. Anschließend geht das System in eine Phase mit sehr geringem Energieverbrauch über, bis die nächste Position ermittelt werden kann. Wenn die Positionen in engen Intervallen aufgezeichnet werden, ist die nächste Lokalisierung schneller abgeschlossen als in langen Intervallen, da der GPS-Empfänger weniger Zeit benötigt, um seine Informationen vom Satelliten zu erneuern.
Die Abbildung 2 zeigt ein Histogramm für die Zeit, die ein GPS-Empfänger benötigt, um den Standort eines weiblichen Rotwilds während einer 10-monatigen Telemetriestudie im Nationalpark Bayerischer Wald zu finden und aufzuzeichnen. 6500 Positionen wurden bewertet. 95% der Standorte wurden in weniger als 135 Sekunden bestimmt; Die durchschnittliche Bestimmung dauerte 51 Sekunden.
Vergleiche
Um die Kapazitäten verschiedener GPS-Halsbänder vergleichen zu können, muss die vom Hersteller verwendete Positionsberechnungsmethode bekannt sein, insbesondere, welcher Zeitraum für das „GPS pünktlich“ vorgesehen ist (gemeinsamer Wert = 90 Sekunden). Dann ist es wichtig zu wissen, ob die Anzahl der Lokalisierungen nach einer „Worst-Case-Berechnung“ berechnet wurde, dh ob die angegebene Anzahl derjenigen entspricht, die der GPS-Empfänger unter definierten Bedingungen (z. B. 0 ° C Umgebungstemperatur) erreichen kann ); oder ob die Berechnungen für optimale Bedingungen unter Angabe der maximalen Anzahl von Positionen durchgeführt wurden.
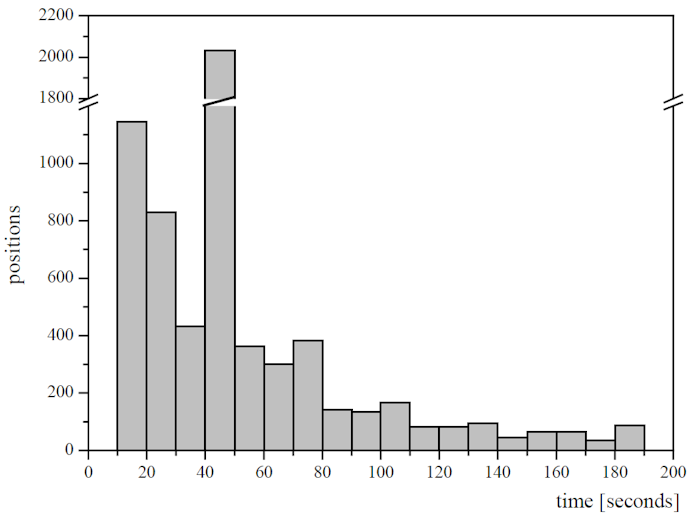
Abb. 2: Zeitdauer, die der GPS-Empfänger benötigt, um Standorte eines weiblichen Rotwilds im Nationalpark Bayerischer Wald zu lokalisieren und aufzuzeichnen
Zukunft der Satellitentelemetrie
Die Zukunft wird den Nutzern ein weiteres Satellitennavigationssystem bieten: Galileo. Die Europäische Union wird die erforderlichen Satelliten bis zum Jahr 2008 vollständig installieren und das System betreiben. Galileo wird so entwickelt, dass Europa über ein eigenes Satellitennavigationssystem verfügt und unabhängig von GPS ist, da das US-Verteidigungsministerium in Krisensituationen die Nutzung durch andere Nationen jederzeit einstellen kann. Mit Galileo wird die Genauigkeit der Positionsbestimmung weiter auf weniger als 5 m erhöht. Im Allgemeinen wird die Satellitentelemetrie dem Benutzer künftig mehr Daten, kleinere Instrumente und eine bessere Datenübertragung bieten.
Mehr Daten bedeuten, dass ein 500 g GPS-Halsband (mit Download-Möglichkeiten) in etwa 5 Jahren bis zu 100000 Positionen aufzeichnen kann. Dies ermöglicht es, die Verbreitungsgebiete von Wildtieren genau zu bestimmen, umfangreiche Lebensraumstudien durchzuführen sowie Jäger-Beutesysteme und andere komplexe Zusammenhänge innerhalb und zwischen Arten zu untersuchen, wie dies derzeit nicht vorstellbar ist. Die Integration optischer Sensoren wird diese Aussicht verbessern. Zum ersten Mal wird es möglich sein, die Biografien einzelner Wildtiere langfristig zu überwachen.
Es werden kleinere und leichtere GPS-Halsbänder mit einem Gewicht von unter 150 g und Kapazitäten zur Bestimmung von Tausenden von Positionen erhältlich sein (Worst-Case-Berechnung). Möglich wird dies durch den reduzierten Stromverbrauch der GPS-Empfänger und leistungsstärkere Batterien.
Die Datenübertragung wird auch bequemer sein. Der Download erfolgt in 10 Sekunden. Darüber hinaus wird die Weitergabe von Daten über das Mobiltelefonsystem unter Verwendung neuer Formate wie beispielsweise UMTS in der Lage sein, größere Informationsmengen schneller zu übertragen.
Zusammenfassung
Die Telemetrie von Wildtieren mit Hilfe von Satelliten ist seit 1978 mit dem Aufkommen des Argos-Systems möglich, mit dem bereits unzählige Studien weltweit durchgeführt wurden. Der Argos-Empfänger ist in einem Gewicht von 10 g erhältlich und kann daher für onithologische Untersuchungen verwendet werden. Die Positionen werden über eine Bodenstation direkt an den Benutzer übertragen. Der Fehler, mit dem eine Position bestimmt wird, liegt jedoch zwischen 100 und 3000 m.
Das seit 1994 für den zivilen Einsatz verfügbare Global Positioning System (GPS) ermöglicht die Bestimmung von Positionen mit einer durchschnittlichen Genauigkeit von 15 m, wobei mit den entsprechenden Korrekturberechnungen eine Genauigkeit von 1 m und weniger erreicht werden kann. Für die telemetrischen Untersuchungen von Wildtieren werden GPS-Empfänger mit spezieller Elektronik in ein Halsband integriert und die ermittelten Positionen dort aufgezeichnet.
Funk, Satellit oder Mobiltelefon
Es gibt verschiedene Möglichkeiten, um diese Daten abzurufen: Erinnerung an das Halsband und Abrufen und Übertragen von Daten über Funk, Satellit oder Mobiltelefon. Das GPS-System ermöglicht es dem Benutzer derzeit, ca. 8000 Positionen in einem Halsband einem Gewicht von 550 g. Die leichtesten Instrumente wiegen weniger als 100 g, können jedoch nur eine begrenzte Anzahl von Positionen erfassen.
In Zukunft werden GPS-Halsbänder kleiner, leichter und haben eine größere Kapazität. Im Jahr 2007 sollte ein 500-g-Halsband 100000 Positionen erfassen können. Halsbänder mit einem Gewicht von weniger als 150 g und der Option, mehrere tausend Positionen aufzuzeichnen, ermöglichen es Forschern, mittelgroße Wildtiere zu untersuchen. Es werden spezielle Sensoren entwickelt, die spektakuläre Einblicke in das Leben von Tieren ermöglichen.
Nach dem Jahr 2008 ein weiteres Satellitensystem. Galileo, das noch genauere Lokalisierungen ermöglicht, wird dem Benutzer zur Verfügung stehen.
Pilotprojekt zur Luchs Telemetrie mit GSM-GPS Halsbandsender
Literatur
Amlaner, C. J.; Sibly, R., McCleery, R. (1979): Effects of telemetry transmitter weight on breeding success in herring gulls. In: Long, F. M. ed.: Proc. 2nd Int. Conf. Wildl. Biotelemetry. Univ. of Wyoming, Laramie: 254-259.
Argos (1984): Location and data collection satellite system user’s guide. Service Argos, Touluse, France 36 pp. Quelle
Berthold, P.; Nowak, E.; Querner, U. ( 1992): Satellitentelemetrie beim Weißstorch (Ciconia ciconia) auf dem Wegzug – eine Pilotstudie. – J. Orn. 133 (Heft 2), 155-163.
Binner, U. (1995): Problems in telemetry of bats in the area of the town Schwerin. In: Stubbe, M.; Stubbe, A.; Hedecke, D. ed.: Methoden feldökol. Säugetierforschung. 1: 397-405. (in german).
Bögel, R., Lotz, A.; Härer, G. (2002): Lebensraumansprüche der Gemse (Rupicapra rupicapra) in Wechselwirkung zu Waldentwicklung und Tourismus. Angewandte Landschaftsökologie 35, Schriftenreihe des Bundesamts für Naturschutz, Landwirtschaftsverlag, Münster,
Britten, M.W.; Kennedy, P.L.; Ambrose; S. (1999) Performance and accuracy evaluation of small satellite transmitters. – Journal of Wildl. Managemt. 63: 1349-1358. Artikel
Craighead, D. (1986): Movements of caribou in western arctic herd. – Argos Newsl. Nr. 26, 1-3.
Craighead, D.J.; Craighead, J.J. (1987): Tracking Caribou using satellite telemetry. National Geographic Research 3 (4): 462-479.
Fielitz, U.; Renner, U.; Schulte, R.; Wölfel, H. (1996): Satellitentelemetrie an Rothirschen im Harz. Eine Pilotstudie. Z. Jagdwiss. 42: 1-11. Artikel
Georgii, B.; Schröder, W. (1983): Home range activity patterns of male red deer (Cervus elaphus L.) in the alps. Oecologia 58: 238-248.
Golden, H.N. (2001): Wildlife research Project statement. Alaska Department of Fish and Game. Division of Wildlife Conservation. Anchorage, internal report.
Grigg, G.(1987): Tracking Camels. Argos Newsl. 29, 1-4.
Howey, W. P. (1994): Tracking the migration of the peregrine falcon. Argos Newsl. 48, 19.
Hurn, J. (1989): GPS: a guide to the next utility. Trimble Navigation Ltd, USA.
Koltz, A. L.; Lentfer, J.W.; Fallek, H.G. (1980): Satellite radio tracking of polar bears instrumented in Alaska. In: A handbook on biotelemetry and radio tracking. Ed. by C.J., Amlaner; D.W., MacDonald. Oxford, 743-752.
Kaatz, M. (1995): Bearbeitung, Auswertung und Dokumentation der über das Migrations-verhalten des Weißstorches gewonnenen Flugzeug- und Satellitendaten. Diplomarbeit, Institut für Geodäsie und Geoinformatik, Universität Rostock.
Le Maho, Y.; Gendner; J.P. (1994): Tracking the emperor penguin across the pack ice. Argos Newsl. 48, 13-15.
Lee, J. E.; White, R. A.; Garrott, R. A..; Bartmann, R. M.; Alldrege, A. W. 1985: Assessing the accuracy of a radiotelemetry system for estimating mule deer locations. J. Wildl. Managmt. 49: 658-663.
Fielitz, U.; Renner, U.; Schulte, R.; Wölfel, H. (1996): Satellitentelemetrie an Rothirschen im Harz. Eine Pilotstudie. Z. Jagdwiss. 42: 1-11. (in german, engl. summary).
White, G. C.; Garrott, R. A. 1990: Analysis of wildlife radio-tracking data. ACADEMIC Press, INC.
Warner, R.E.; Etter, S. L. 1983: Reproduction and survival of radio-marked hen ring-necked pheasants in Illinois. J. Wildl. Managmt. 47: 369-375.
Webster, A. B.; Brooks, R. J. (1980): Effects of radiotransmitter on the meadow vole, Microtus pennsylvanicus. Can J. Zool. 58:997-1001. Linkverweis